- 明治理工ラボ TOP
- 教員と研究
- 情報科学科 画像応用システム研究室
宮本龍介 准教授
人を越える
コンピュータを
目指して。
情報科学科 画像応用システム研究室 宮本龍介 准教授

一般的な光学カメラで得られる画像から様々な情報を取り出し活用する画像処理技術。宮本先生の研究は自律走行ロボット、人間の歩き方の特徴を捉えた人物照合など多岐にわたります。この研究領域を目指したきっかけとその先にあるやりがいについてお話しいただきました。
知的欲求に忠実な選択を。
大学時代に友人の家で出会った、田丸啓吉先生の「論理回路の基礎」という本が私の人生の分岐点の一つとなりました。その本に書かれていたコンピュータを動かすロジックの世界がとても面白かったことはいまでも印象に残っています。そのことがきっかけとなり、工業化学科を卒業後情報学科への学士編入を経て大学院へ進学しました。
大学院では画像データの圧縮技術やコンピュータの高速化の研究に取り組みました。その後、就職し社会に出たのですが、短期的な利益の追求に陥りがちな製品開発を面白いと感じることができませんでした。その経験によって自分の人生を見つめ直し、どうせ一度限りなのだから、不満を持ちながらただ耐えるのではなく、やりたいと思うことに全てを掛けて挑んでみよう。その決意のもと、画像認識をテーマとして博士課程の学生として大学に戻り、研究を楽しみました。

視覚情報の限界に挑む。
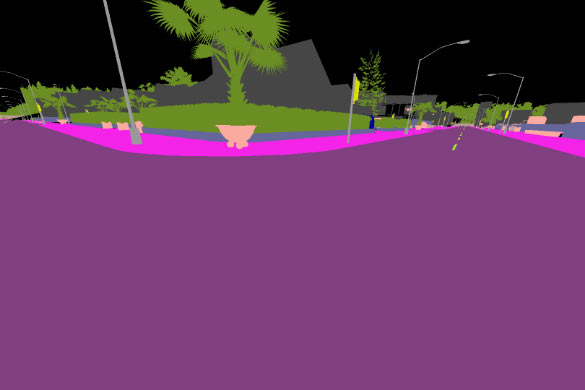
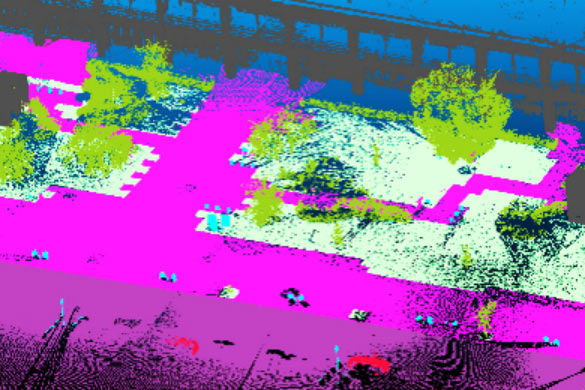
画像認識は画像に秘められた有用な情報を取り出し、活用する技術です。例えば自動運転では、3D LiDAR や RADAR 等の可視光以外の情報を用いるセンサを用いて障害物を含む周囲の環境を認識しています。それに対し私の研究室では、一般的な光学カメラのみを外界センサとすることでセンサコストを低減させ、その結果、より幅広い分野における自律移動ロボットの普及を目指した研究に取り組んでいます。この研究の中核技術は、画像を入力とする意味論の理解であり、機械学習/深層学習を応用した研究に取り組んでいます。
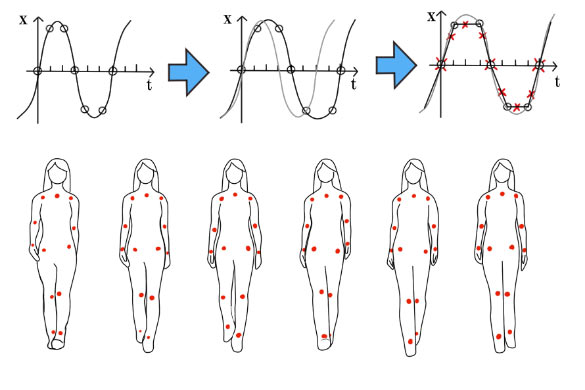
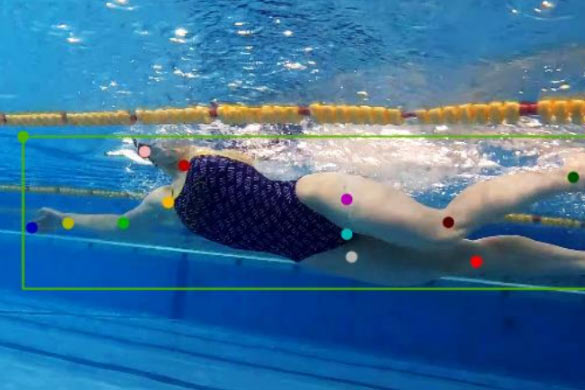
一般的なカメラの映像から、人の歩き方である「歩容」の情報を取り出す研究も進めています。歩容には相当な個人差があるので、映像で歩容を正確に捉えることができれば、簡単に人物照合ができます。例えば、保釈中の人物の国外脱出やテロリストの入国を制限するなど防犯にも役立つでしょう。さらに、スポーツ選手のフォーム解析や疲労の測定にも有用だと考えています。
現在は画像情報を主たる研究対象としていますが、視覚だけでなく多くの領域に置いて人の能力を越えるコンピュータを具現化したいと考えています。
楽をするために知恵を絞る。
私の研究スタイルは、学生を育て研究チームをつくり、チームで成果を出していくこと。そのため、研究と同様に自分で考え自律的に動ける学生を育てていくことも、私のやりがいとなっています。そして、ともに研究を遊ぶように楽しみ、これからの不確実な社会を支えられる人を育てられたらと思っています。
研究活動においては様々な最適化が重要になりますが、特にどれだけ「楽をするか」ということを重視しています。人間、誰しもつまらないことに時間を費したくはないので、上手く自分が手抜きをしてコンピュータにタスクを投げる。つまりは、自動化に知恵を絞る。このような発想はプログラムの効率化や様々な自動化に繋がるため、情報分野に従事する者にはとても重要だと信じています。

アニメ化もされた漫画作品「攻殻機動隊」に登場する「タチコマ」をつくることが生涯の目標です。自律的に行動し、知識や経験を互いに共有し集合知を得、自我の獲得に至る。研究室の構成員もタチコマのように連携しながら、個々の気づきや発想をチームの力に変換し、チームとしても、また個人としても成長できればと思います。

サーバルームには研究を推進する高機能サーバが揃っている

自律走行実験用ラジコンカーは、設置されたカメラで画像データを取得する

研究室には関連書籍が並ぶ

研究室には畳の小上がりがあり、リラックスしてディスカッションを行える
スタッフについて
情報科学科 画像応用システム研究室宮本龍介准教授
2003年京都大学大学院情報学研究科修了。博士(情報学)。2013年明治大学理工学部に専任講師として着任。2021年より現職。画像応用システム研究室にて、機械学習の実問題への応用に取り組んでおり、主に画像処理に関連するタスクを研究対象としている。
研究内容
-
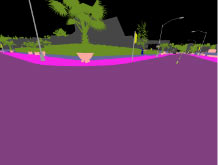
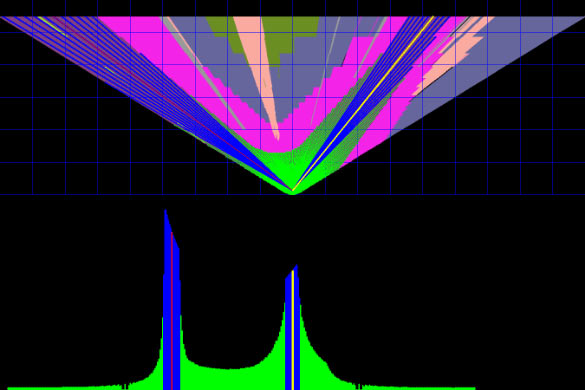
自律移動ロボットに関する研究
人が移動する場合と同様に、道なり走行と交差点における方向転換を繰り返すことにより自律移動を行う手法を研究している。本研究の特徴は画像のみを入力とし、意味論的領域分割の結果のみに基づきロボットの行動を決定していることである。その実現のため、距離を擬似的に測定するための Virtual LiDAR、移動軌跡を得るための Visual Odometry の研究も行い、実環境で利用可能な方式の実現を目指している。

-
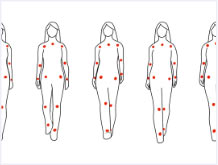
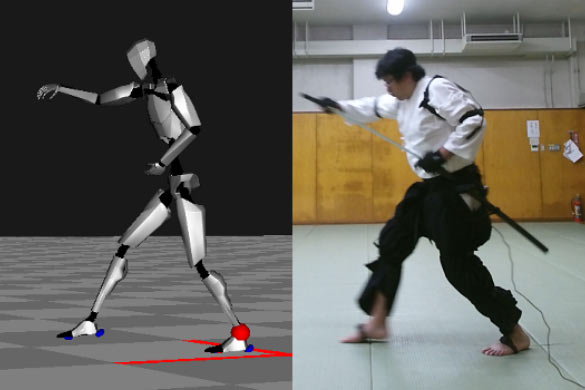
画像処理に基づく姿勢推定とその応用
姿勢推定とは、人物の腕や手足といった部位が画像平面あるいは実空間においてどのような位置にどのような姿勢で存在するかを推定する技術である。本研究室では、歩き方に着目した個人識別技術である歩容解析、スポーツ選手のパフォーマンス向上のための動作解析、武術のような伝統技術の保存を目的とした3次元計測等を対象とし、主たる入力情報である画像に対して機械学習技術に基づく手法の構築に取り組んでいる。
-

データセットの自動・半自動生成
深層学習技術の応用には大規模な訓練データセットが不可欠であるが、作成に要する人的労力は膨大である。この問題を解決するため、3D CG や実測 3D スキャンデータを活用し、データセットを自動的あるいは僅かな人的労力を加えるのみで生成する方法を模索している。特に、人の目には違和感が無いレベルであっても問題となる人工データと実データの間に生じるドメインギャップへの対応が主な課題となっている。

-

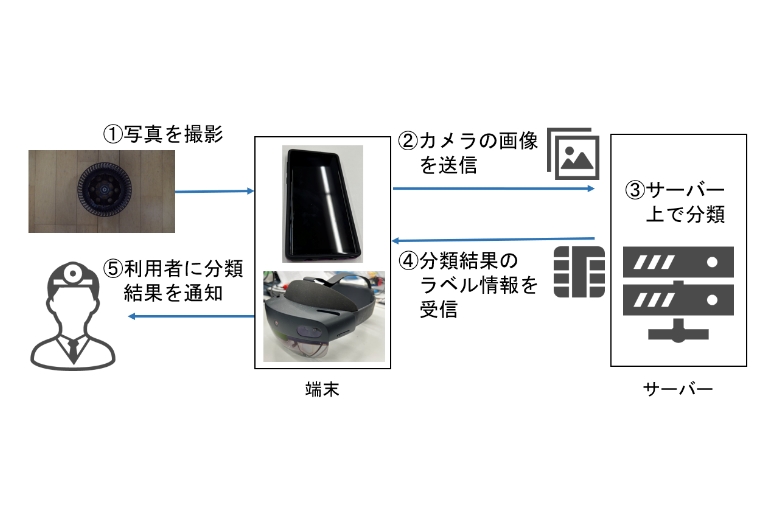
VR/AR 技術の実アプリケーションへの応用
VR/AR 技術の用途として一般に考えられるのはエンターテインメント領域であるが、本研究ではより工業的応用を考えたアプリケーションの実現に取り組んでいる。下図の例では、3D CG を訓練入力として用いて構築された分類器を用い、入力画像に含まれている部品の分類を行い、分類結果に基づき Hololens を用いて分類結果と実空間における画像情報をオーバーレイ表示している。


-

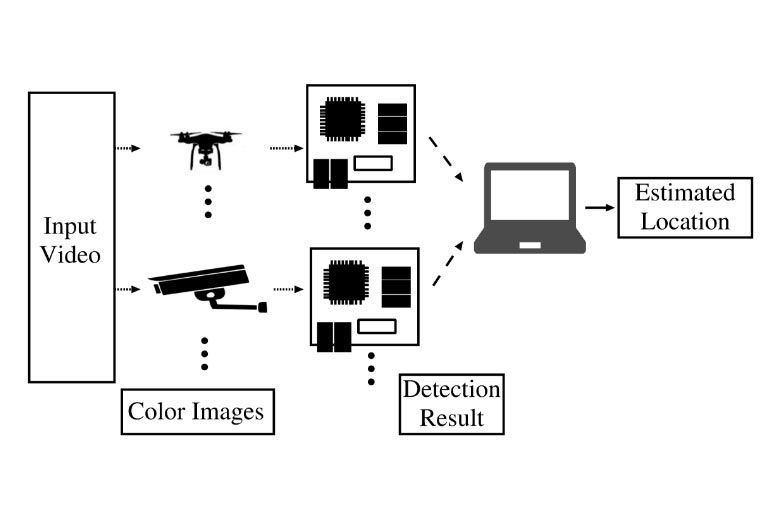
システム実装に関する研究
画像を入力とするリアルタイムシステムでは、適切な並列化や専用HWの利用が不可欠である。本研究室では、上述のような様々なタスクを解く手法に関する研究だけでなく、このような処理を実時間で行うためのシステムアーキテクチャに関する研究にも取り組んでいる。特に、対象アプリケーションとシステム実装の両面において深い知見が要求されるエッジコンピューティングにおけるシステム最適化は強みの1つである。

















主要な業績
-
2020.12 論文 / 共著Ryusuke Miyamoto, Miho Adachi, Hiroki Ishida, Takuto Watanabe, Kouchi Matsutani, Hayato Komatsuzaki, Shogo Sakata, Raimu Yokota, Shingo Kobayashi:
Visual Navigation Based on Semantic Segmentation Using Only a Monocular Camera as an External Sensor. J. Robotics Mechatronics 32(6): 1137-1153 (2020) -
2019.11 論文 / 共著Miho Adachi, Sara Shatari, Ryusuke Miyamoto:
Visual Navigation Using a Webcam Based on Semantic Segmentation for Indoor Robots. SITIS 2019: 15-21 -
2013.12 論文 / 共著Jaehoon Yu, Ryusuke Miyamoto, Takao Onoye:
A Speed-Up Scheme Based on Multiple-Instance Pruning for Pedestrian Detection Using a Support Vector Machine. IEEE Trans. Image Process. 22(12): 4752-4761 (2013) -
2010.11 論文 / 共著Hiroki Sugano, Ryusuke Miyamoto:
Highly optimized implementation of OpenCV for the Cell Broadband Engine. Comput. Vis. Image Underst. 114(11): 1273-1281 (2010) -
2009.01 論文 / 共著Masayuki Hiromoto, Hiroki Sugano, Ryusuke Miyamoto:
Partially Parallel Architecture for AdaBoost-Based Detection With Haar-Like Features. IEEE Trans. Circuits Syst. Video Technol. 19(1): 41-52 (2009)