- 明治理工ラボ TOP
- 教員と研究
- 機械情報工学科 複雑ロボットシステム研究室
新山龍馬 准教授
やわらかいロボットで、
ロボットの概念を
変えていく。
機械情報工学科 複雑ロボットシステム研究室 新山龍馬 准教授

やわらかい材料を使い、やわらかい構造を持った、新しいロボットが現れつつあります。ソフトロボティクスと呼ばれるそのロボットの形態と構造は複雑そのもの。新山先生率いる複雑ロボットシステム研究室は、今までにない新しいロボット学を追求しています。ここでは、自身の研究領域に至った経緯と、その魅力についてお話しいただきました。
ロボコン三昧の学生時代。
小学校で好きな教科は図画工作、中学校では技術や家庭科。とにかく興味があったのは“作ること”です。高校は普通科よりも、ものづくりを学べる学校がいいと、国立高等専門学校の電子制御工学科へ進みました。当時憧れていたのは、全国の大学生がロボットで競い合うNHKロボコン。大学生でなくても、高専を対象とした高専ロボコンという大会があり、そこに出場できます。そのことも高専を選んだ理由のひとつです。
入学後はすぐにロボコンサークルに入り、ロボット三昧の学生生活に。仲間とチームを組んでロボコンに出場するようになり、全国大会に勝ち上がったこともあります。僕は設計、製作、操縦、何でもやりました。複雑なロボットを作り上げるには5〜6人のメンバーが必要です。“理系のスポーツ”と呼ばれるロボコンには、対戦相手がいて勝ち負けがある。運の要素も見過ごせない。自分たちがつくったロボットが動き、競い合うことが何よりも面白かったです。大学に編入してからもロボコンを続け、世界大会への出場も果たしました。振り返ってみると、ロボコンは、技術を超えたところにある情熱、学校や国を超えたつながり、そこから生まれるアイデアと学校では学べない多くのことを体験することができました。ロボコンなくして、私の学生生活はなかったと思っています。

猫型ロボットを、作りたい。
学部時代、東京大学工学部の機械情報工学科で学び、研究室で取り組んだテーマは猫型ロボット。体がやわらかくて狭いところをするりと通り抜け、壁にひょいと飛び乗ることができるといった、猫のような能力を持ったロボットを作りたいと挑戦しました。動物みたいな姿をしたロボットはあっても、その動きを実現できていないという問題意識があったからです。もし掃除機を作ってほしいと言われたら、すでに掃除機は存在するので、やるべきことは容易に想像がつきます。でも、誰も作ったことがない猫型ロボットとなると、作り方さえ皆目見当がつかなくなる。試作するけれど、全く思うようにいかない。もう一体作ってみたけれど、やっぱり同じ。その繰り返しです。
ロボコンでは、どんなロボットを作ってもいいとはいえ、誰かが決めたルールがありました。ある意味やるべきことははっきりしていて、勝負もつくわかりやすい世界。ところが、研究の世界ではルールさえも自分で決めていいから、答えのない“一人ロボコン”状態です。「こんなロボットがあったらすごいんじゃないか?」と、自らの問いから始まるのです。誰も作ったことがないものを作る、そのプロセスは険しいけど、それこそが研究そのものだと思うのです。
未来のロボットは、新しい生き物。
現在、複雑ロボットシステム研究室ではソフトロボティクスや生物型ロボット、そして、やわらかい乗り物を研究しています。ロボットというと、普通は機械らしい、カクカクした動きや金属的で重くて硬い印象のものを思い浮かべると思います。私が着目したソフトロボティクスという領域とはハードウェアをやわらかくしたより生き物らしいロボット技術のこと。ここで言う「ソフト」はソフトウェアのことではなく、ロボットの構造がやわらかいことを指します。構造のやわらかさは、力に対して変形しやすいことを意味し、通常の機械設計では精度にとってデメリットとみなされます。しかし、例えば安全性の観点では、人間にぶつかった時に容易に変形することはメリットになります。やわらかいロボットにとって得意なこと、苦手なことの両方があるので、適材適所のセンスでロボットの新しい形を模索することが重要です。
ソフトロボティクスには機械と情報の融合が不可欠で、物理空間と仮想空間を行き来して、実物のロボットとシミュレーションのロボットとを補い合わせるチャレンジが必要です。また、デジタルデータをもとに部品を製作するデジタルファブリケーション技術を活用したロボット開発や、機械学習の手法を使ってロボットの多様な動きを引き出すことも大切です。これからのロボットは、人間が作る新しい生き物みたいな存在になっていくのではないでしょうか?日本発のまったく新しいロボットで、今あるロボットの概念を変え、世界にインパクトを与えていきたいです。

8歳の誕生日に両親からもらったプレゼント。何度も読み返し、私がこの道に進んだきっかけの一つだと思い、今でも大切にしています。このプレゼントの他にも両親には幼い頃につくば万博に連れて行ってもらったりと、ロボットや科学技術を触れ合うことが多い幼少期でした。そういったことがあったからこそ、今の自分がいるのだと思います。

研究室の向こう側にはキャンパスが見渡せる

パーツごと設計図を作成していく

楽しんで研究ができるように、遊び心がある環境を整えている

インフレータブルモビリティは、人が乗って操作することができる

こだわりの研究機材が揃っている
スタッフについて
機械情報工学科 複雑ロボットシステム研究室新山龍馬准教授
2010年東京大学大学院学際情報学府博士課程修了。博士(学際情報学)。2023年より現職。複雑ロボットシステム研究室にて、生物規範ロボットおよびソフトロボティクスの研究を主軸として、ディジタルとフィジカルを行き来できるロボティクスの開拓を目指し研究を行なっている。
研究内容
-
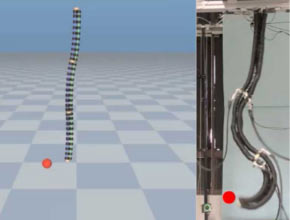
連続ロボットアーム・超冗長マニピュレータの開発
産業用ロボットアームとは異なる、独自のロボットアームを開発している。ゾウの鼻やタコの足のように関節のない連続ロボットアームは狭い場所へ手を伸ばすことや、巻きつくことで物体を把持するなど器用で巧みなロボットアームを開発を行なっている。
-

人と触れ合うインフレータブルロボットの開発
内圧で支えられた膜構造であるインフレータブル構造を使った軽量で大型のロボットを開発している。用途としては、遠隔操作ロボットに豊かな身体性を与えるサイバネティクアバターとして、また、人間と直接触れ合うpHRI (physical human-robot interaction)のプラットフォームとして利用する。コンピュータによる風船構造の設計支援や自動設計にも取り組んでいる。
-

インフレータブルモビリティの開発
インフレータブルロボットのスピンオフとして、インフレータブル構造を使った電動の乗り物を開発している。空気を抜いて折り畳めばコンパクトになり、空気を入れると人間の体重を支えられる強度がある。ユーザーに合わせて形状をカスタマイズできることが特長である。



主要な業績
-
2022 論文 / 共著“A 3D Printed Hydrostatic Skeleton for Earthworm-inspired Soft Burrowing Robot,” Soft Matter, Vol. 18, Issue 41, pp.7990-7997, 2022.
-
2022 論文 / 共著“Robostrich Arm: Wire-Driven High-DOF Underactuated Manipulator,” Journal of Robotics and Mechatronics, Vol. 34, No. 2, pp.328-338, 2022.
-
2021 論文 / 共著“Blower-powered Soft Inflatable Joints for Physical Human-Robot Interaction,” Frontiers in Robotics and AI, Vol.8, pp.1-12 (720683), 2021.
-
2020 論文 / 共著“Liquid Pouch Motors: Tube-less Planar Pneumatic Actuators Driven by Liquid-to-gas Phase Change,” IEEE Robotics and Automation Letters, Vol.5, No.3, pp. 3915-3922, 2020.
-
2015 論文 / 共著“Pouch Motors: Printable Soft Actuators Integrated with Computational Design,” Soft Robotics, Vol.2, No.2, pp.59-70, 2015.