


Rovers (probes) developed by the Autonomous Robot Research Cluster
The Autonomous Robot Research Cluster, within the Organization for the Strategic Coordination of Research and Intellectual Properties, has been cooperating with the Nishinoshima Comprehensive Academic Survey conducted by the Ministry of the Environment. This annual survey aims to better understand how pristine ecosystems form on oceanic islands.
Nishinoshima, part of the Ogasawara Islands, is one of the most isolated islands. Its unique environment, where new ecosystems emerge after being previously destroyed by active volcanic activity, has drawn the attention of ecosystem researchers worldwide.
Since 2023, the Autonomous Robot Research Cluster has been assisting with this survey, contributing a rover (probe) they developed and its remote control technology to investigate Nishinoshima, where human access and landing are impossible due to ongoing volcanic activity.
In the 2023 survey, the research team of our university transported the rover (probe vehicle) they created to the island about 1 km away from the research vessel using a drone, remotely operated from it, and successfully collected valuable samples such as volcanic ash from the island using the attached sampling arm.
Since there was no communication environment on the island, they relied on radio control to navigate, using video from the rover’s onboard camera and aerial video from a drone hovering above.
The survey conducted in fiscal 2024, which marked the cluster’s second participation and involved collaboration with biological experts, includes the following contribution:
This survey was featured in the NHK E program, “Science ZERO, The Land Where Ecosystems Begin—Close-up! Nishinoshima Biological Survey,” which aired on January 26, 2025.
Associate Professor KATO Keisuke
(Department of Mechanical Engineering, School of Science and Technology; Cluster Researcher)
Developed a rover equipped with new functions, and engaged in its operation, sample collection and night exploration.
Professor OZAWA Ryuta
(Department of Mechanical Engineering Informatics, School of Science and Technology; Cluster Deputy Head)
Developed disk-shaped insect cages and ejectors for capturing and collecting insects and other organisms, then installed many of them using the ejectors.
Professor KURODA Yoji
(Department of Mechanical Engineering, School of Science and Technology; Cluster Head)
Investigated turbidity in the coastal waters of Nishinoshima caused by volcanic ejecta, controlling a small wireless boat.
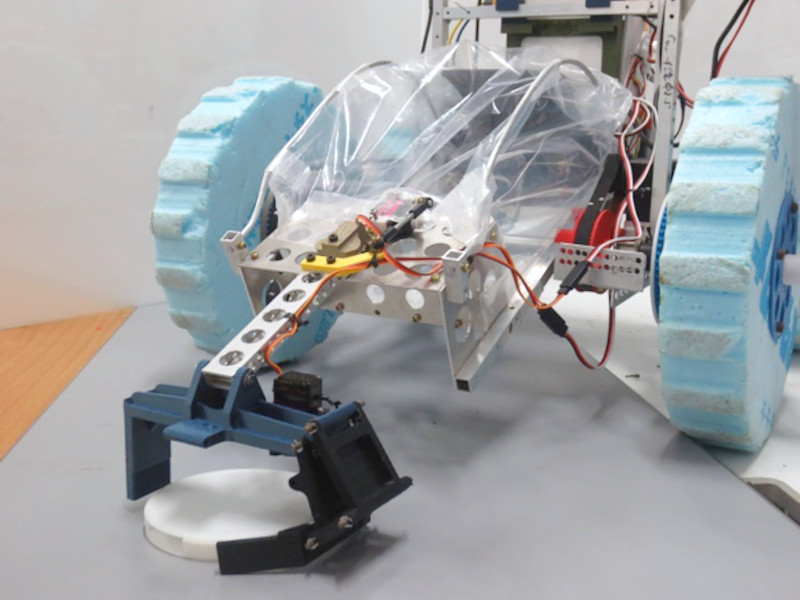
Rover for collecting insect cages